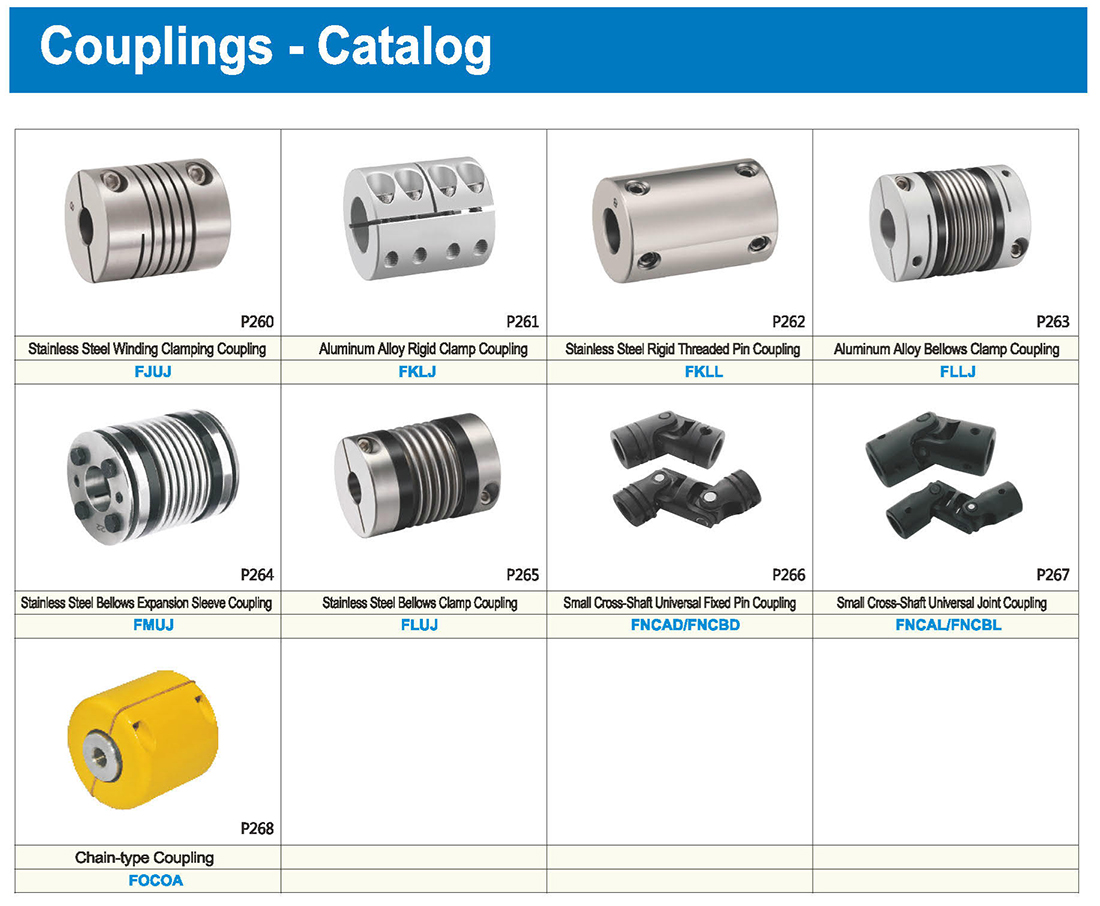
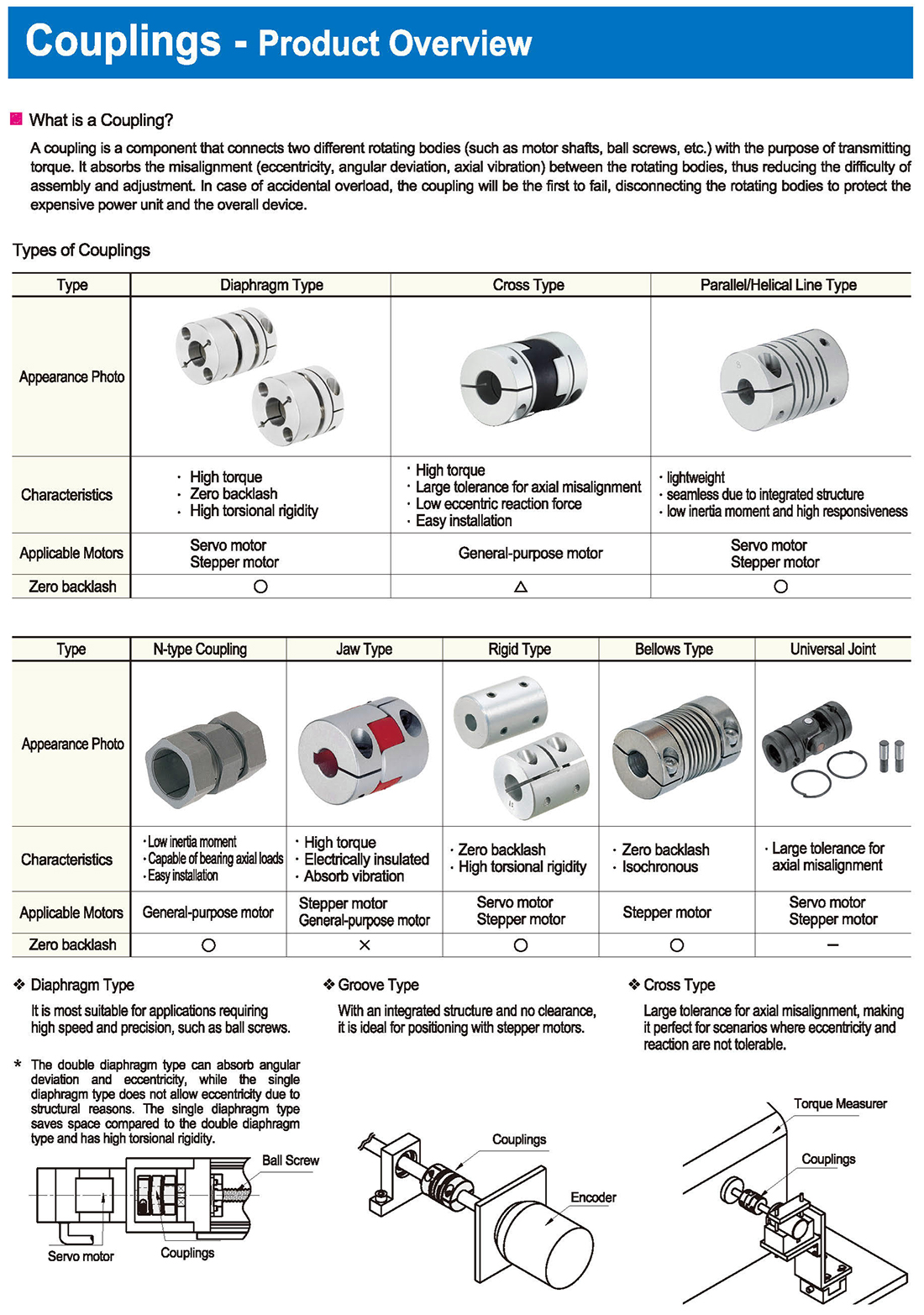
Types of Couplings
Type: Diaphragm Type, Cross Type, Parallel/Helical Line Type
Appearance Photo: Characteristics - High torque, zero backlash, high torsional rigidity, large tolerance for axial misalignment, low eccentric reaction force, easy installation, lightweight, seamless due to integrated structure, low inertia moment, and high responsiveness
Applicable Motors: Servo motor, stepper motor, general-purpose motor.
N-type Coupling: Jaw Type, Rigid Type, Bellows Type, Universal Joint
Appearance Photo: Characteristics - Low inertia moment, capable of bearing axial loads, electrically insulated. N-type coupling features seamless operation, simple installation, and requires no lubrication.
Applicable Scenarios: Jaw type is suitable for low-speed applications, easy disassembly/assembly, easy alignment adjustment, wear-resistant. Rigid type tolerates large axial misalignment, lightweight, shock-resistant, and low noise. Bellows type has low backlash, easy alignment adjustment, suitable for high-speed applications, and corrosion-resistant。
It is most suitable for applications requiring high speed and precision, such as ball screws.
Groove Type
With an integrated structure and no clearance, it is ideal for positioning with stepper motors.
Large tolerance for axial misalignment, making it perfect for scenarios where eccentricity and reaction are not tolerable.
* The double diaphragm type can absorb angular deviation and eccentricity, while the single diaphragm type does not allow eccentricity due to structural reasons. The single diaphragm type saves space compared to the double diaphragm type and has high torsional rigidity.
Encoder & Torque Measurer
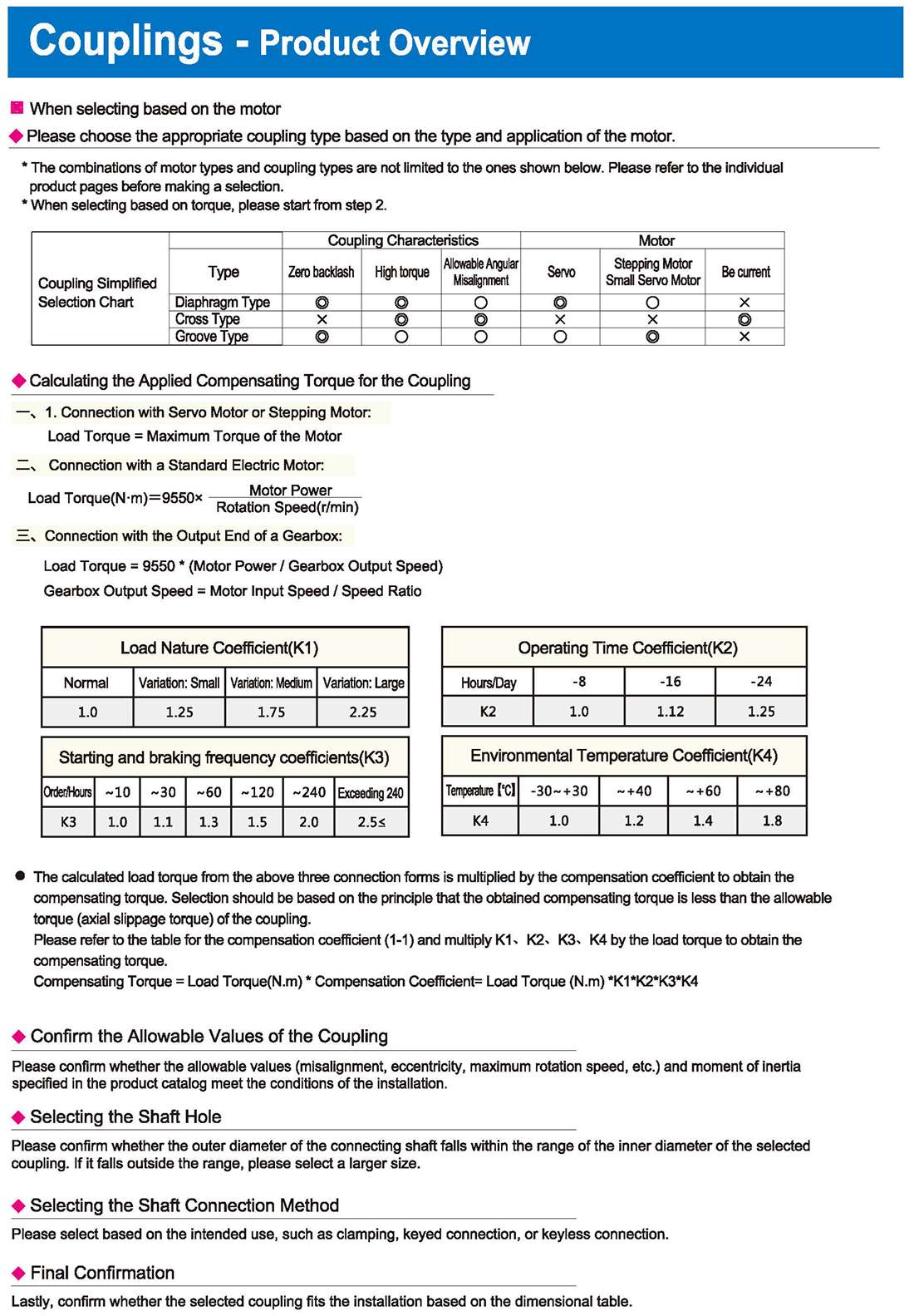
When selecting based on the motor, please choose the appropriate coupling type based on the type and application of the motor.
* The combinations of motor types and coupling types are not limited to the ones shown below. Please refer to the individual product pages before making a selection.
* When selecting based on torque, please start from step 2.

Types of Couplings
Type: Diaphragm Type, Cross Type, Parallel/Helical Line Type
Appearance Photo: Characteristics - High torque, zero backlash, high torsional rigidity, large tolerance for axial misalignment, low eccentric reaction force, easy installation, lightweight, seamless due to integrated structure, low inertia moment, and high responsiveness
Applicable Motors: Servo motor, stepper motor, general-purpose motor.
N-type Coupling: Jaw Type, Rigid Type, Bellows Type, Universal Joint
Appearance Photo: Characteristics - Low inertia moment, capable of bearing axial loads, electrically insulated. N-type coupling features seamless operation, simple installation, and requires no lubrication.
Applicable Scenarios: Jaw type is suitable for low-speed applications, easy disassembly/assembly, easy alignment adjustment, wear-resistant. Rigid type tolerates large axial misalignment, lightweight, shock-resistant, and low noise. Bellows type has low backlash, easy alignment adjustment, suitable for high-speed applications, and corrosion-resistant。
It is most suitable for applications requiring high speed and precision, such as ball screws.
Groove Type
With an integrated structure and no clearance, it is ideal for positioning with stepper motors.
Large tolerance for axial misalignment, making it perfect for scenarios where eccentricity and reaction are not tolerable.
* The double diaphragm type can absorb angular deviation and eccentricity, while the single diaphragm type does not allow eccentricity due to structural reasons. The single diaphragm type saves space compared to the double diaphragm type and has high torsional rigidity.
Encoder & Torque Measurer
When selecting based on the motor, please choose the appropriate coupling type based on the type and application of the motor.
* The combinations of motor types and coupling types are not limited to the ones shown below. Please refer to the individual product pages before making a selection.
* When selecting based on torque, please start from step 2.
 English
English Russian
Russian Spanish
Spanish Italian
Italian Arabic
Arabic Korean
Korean German
German Japanese
Japanese Vietnamese
Vietnamese Turkish
Turkish


 Introduction
Introduction Specification Table
Specification Table Download
Download
